Raúl Díaz GarcíaI am a Senior Data Scientist and Computer Vision Engineer at the Professional Services division of Amazon Web Services. Before joining AWS, I worked as a Research Engineer at HP Inc. My work pivots around the design and deployment of new products related to Computer Vision and Machine Learning. My main job focus involves technologies such as 3D scanning, photogrammetry, metrology, and deep learning on 2D and 3D data. I was a PhD student at UC Irvine, where I was advised by professor Charless Fowlkes at the Computer Vision group. I explored the rapid growth of social networks and digital mapping data, which offers a rich source of contextual information that can be exploited in practical computer vision systems. My Ph.D. research focused on improving object detection and image segmentation by finding geometric context cues. In particular, I investigated how structure from motion and multi-view stereo can help in the world of scene understanding. GitHub / Google Scholar / LinkedIn / CV |

|
PhD Thesis |
|
Raúl Díaz
Strong Geometric Context for Scene UnderstandingUniversity of California, Irvine, 2016 thesis / bibtex / |
Research Publications |

|
Soft Labels for Ordinal RegressionRaúl Díaz, Amit Marathe Conference on Computer Vision and Pattern Recognition (CVPR), 2019 paper / poster / errata / bibtex / A general label formulation of naturally ordered categories that seamlessly blends metric losses and categorical losses. In just two lines of code , we improve the state of the art on wildly different tasks. |
|
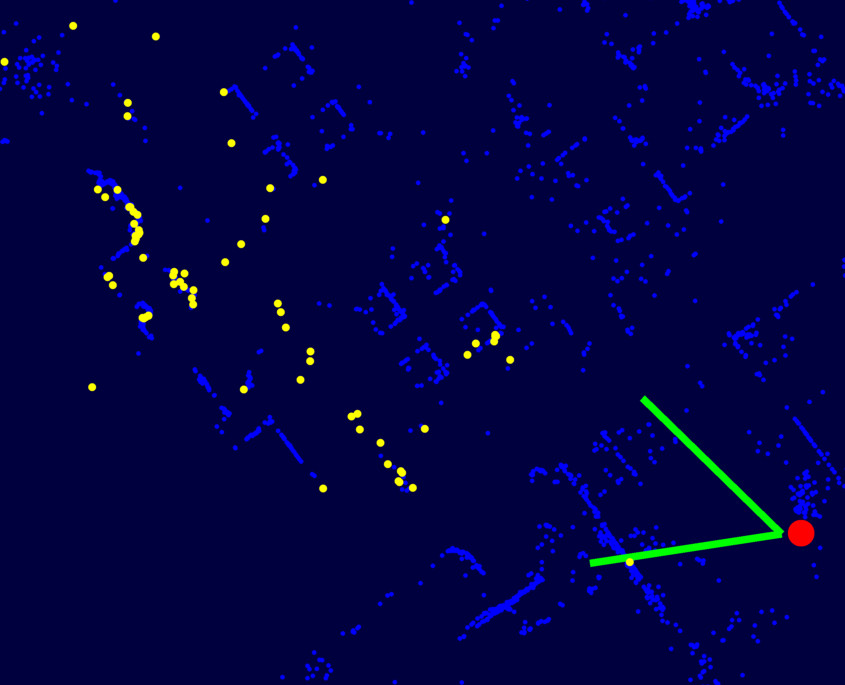
Cluster-Wise Ratio Tests for Fast Camera LocalizationRaúl Díaz, Charless Fowlkes Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, 2017 paper / poster / code / bibtex / We exploit the negligible cost of exploring the adjacent leaves in kd-tree searches to rapidly cast votes on plausible camera locations. We then back-match these scene landmarks against the query image for high quality PnP solving of the 6DOF camera pose. |

|
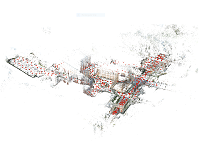
Lifting GIS Maps into Strong Geometric Context for Scene UnderstandingRaúl Díaz, Minhaeng Lee, Jochen Schubert, Charless Fowlkes Winter Conference on Applications of Computer Vision (WACV), 2016 paper / poster / bibtex / We present a Sketchup editing toolbox to turn 2D GIS maps into fully semantic 3D scenes by overlaying geo-registered images. Depth, detection, and segmentation are then improved by injecting geo-semantic features into known specialized algorithms. |
|
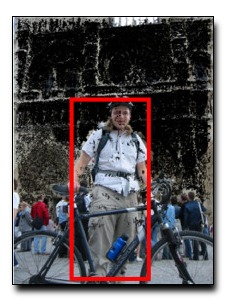
Detecting Dynamic Objects with Multi-View Background SubtractionRaúl Díaz*, Sam Hallman*, Charless Fowlkes International Conference on Computer Vision (ICCV), 2013 paper / supplementary / poster / bibtex / We use Structure from Motion and Multi-View Stereo to unsupervisedly mine hard negatives, and then re-score object detections based on background masks, achieving up to a 50% boost over baselines.
|
|
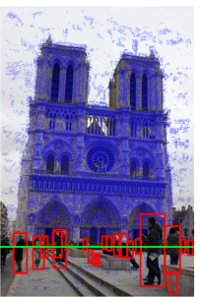
Multi-View Background Subtraction for Object DetectionRaúl Díaz*, Sam Hallman*, Charless Fowlkes Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, 2013 abstract / bibtex / A first introduction into how algorithms that target the modelling of static scenes can help object detectors find non stationary categories.
|
Public Code Repositories |
|
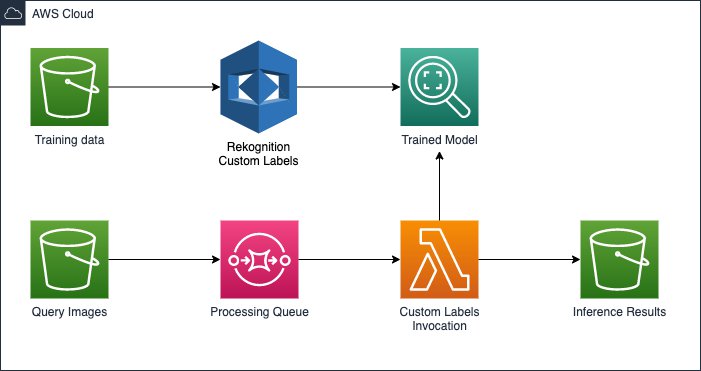
Serverless Amazon Rekognition Custom Labelscode / Shows how to create an object detection model using Amazon Rekognition Custom Labels.
|
|
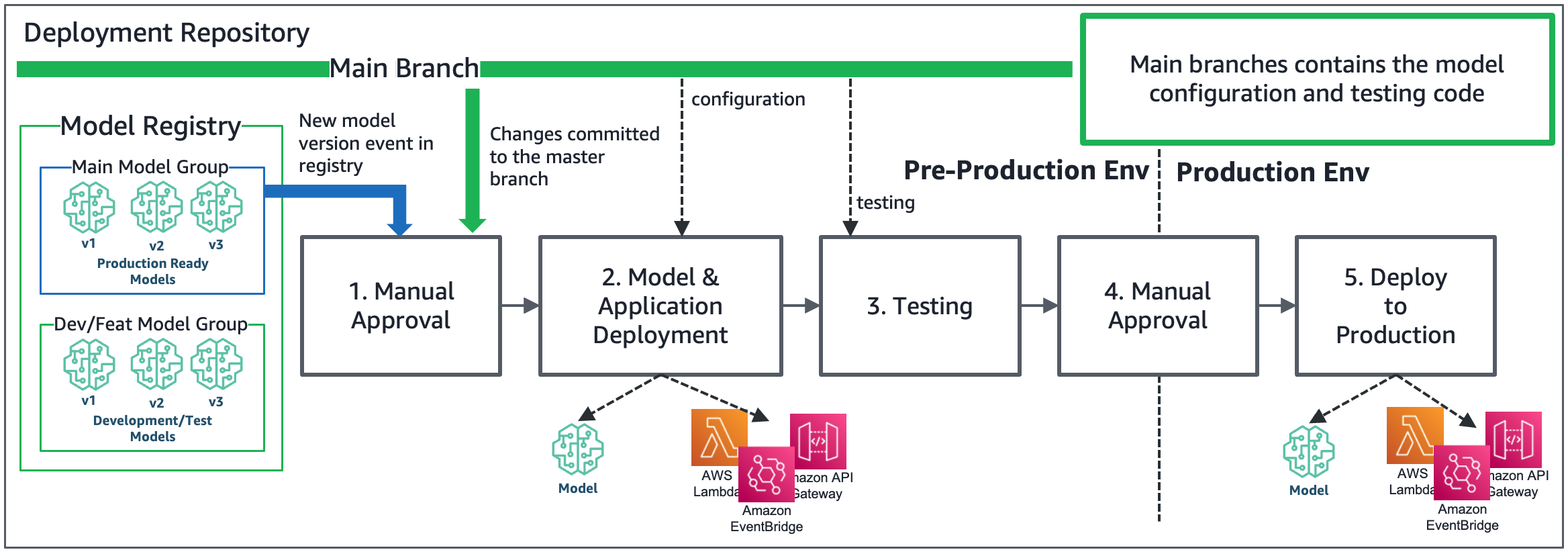
AWS Enterprise MLOps Frameworkcode / Principal Author of the MLOps@Edge use case template
|
|
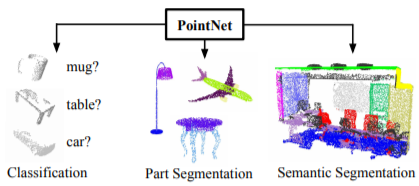
PointNet for Kerascode / Keras implementation of the PointNet 3D classification network.
|
|
Layout design from Jon Barron's website
|